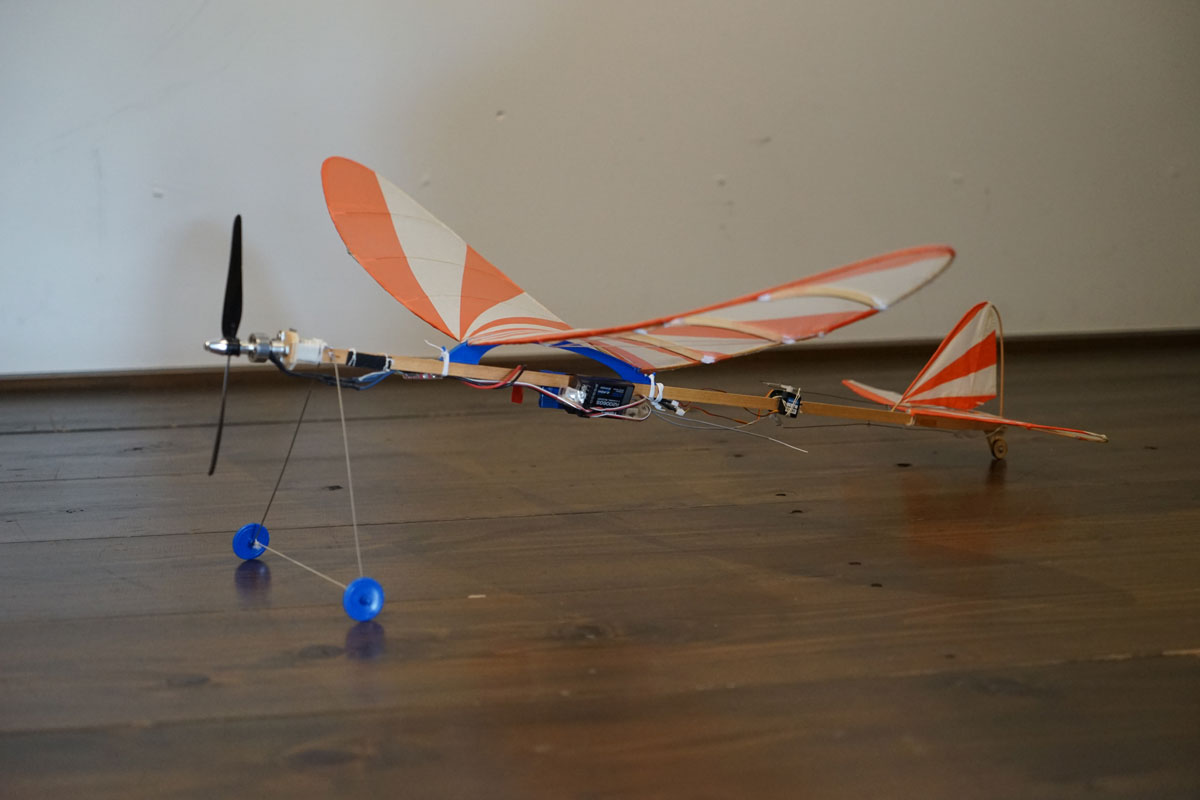
開発拠点である飯田館の土間には何年も前からラジコン化されたライトプレーン(元はゴム動力飛行機)があって、飛ばしたいと思っていました。飯田館の近くには信州大学教育学部のグラウンドや城山公園などがあり、Play&Craftの時間に紙飛行機を飛ばしに行くという話も出たので、この機会に飛ばせるようにしようと動き始めました。
しかし、いくつかの問題があって気軽には飛ばせないのがラジコン飛行機なのです。
BLOG

研究員ののん気なコラム(タケさん#2)
開発拠点である飯田館の土間には何年も前からラジコン化されたライトプレーン(元はゴム動力飛行機)があって、飛ばしたいと思っていました。飯田館の近くには信州大学教育学部のグラウンドや城山公園などがあり、Play&Craftの時間に紙飛行機を飛ばしに行くという話も出たので、この機会に飛ばせるようにしようと動き始めました。
しかし、いくつかの問題があって気軽には飛ばせないのがラジコン飛行機なのです。
いわゆる「フライトシミュレーター」で、離陸してから着陸するまでの操縦を自力でやってみてもらうとわかると思いますが、飛行機の操縦が難しい理由には、高速で飛び続ける必要がある上に立体的に動くことや目に見えない風の影響を受けることなどがあります。
特に着陸は難しく、高度を下げるために機首を下向きにしていくと重力の影響で速度が上がり、その影響で揚力が増して徐々に機首が上向きに変わっていくため高度が下げにくくなることや、滑走路から飛び出さないように速度を十分に下げる必要がありますが、失速(ストール)に近い状態になって操作量に対して動きが少なくなったり遅れて反応したりして制御が難しくなることもあります。
さらにラジコン(無線操縦)の場合には、遠ざかった時に機体や状態(向きや角度)が見えづらくなることや近づいてくる時に左右が入れ替わることなどの理由も加わります。
他にも、航空法が改正されたり無人航空機を危険視する人が増えたりして、多くの練習が必要なのに気軽に練習できない状況になりました。特に無人飛行機の場合は、広い場所への移動、場所の利用申請や許可を得ることが必要で、複数人いたら1人ずつ飛ばし交代しなければならないという条例やルールなどがあります(※)。その上、気象条件にも左右されて、風が強い日や雨の日、雪の日は飛ばせません。
ラジコン飛行機やドローンの飛行は操縦がやや複雑で難しいため多くの練習が必要なのに、他の事にも時間を取られてしまいます。
※ 長野市の場合は、「航空用ラジコン広場のご案内 (https://www.city.nagano.nagano.jp/n155400/contents/p003107.html)」にあるように、利用登録と予約(利用申請)が必要です。また、原則として航空用ラジコン広場(落合運動場内)のみで、屋内を含めてこれ以外の施設での飛行は禁止となっています。(スポーツ施設における無人航空機等の飛行許可について https://www.city.nagano.nagano.jp/n155400/contents/p002965.html)
また、実機の場合は製作だけでなく修理や飛行できる場所への移動にも時間や費用がかなりかかることも、気軽に飛ばせない理由として挙げられます。
今回は、失敗して壊した時に買い替える予算や修理するような時間はほぼないため、壊すわけにはいかないので簡単には試せない状況です。さらに、フライトシミュレーターで基本的な操縦はできるようになりましたが、ラジコン飛行機については素人、教えてくれる人が近くにおらず、機体の方にもバランス取りができていない、エルロンがないなど、いくつもの不安材料があります。
そこで「シミュレーター」の出番です。シミュレーターなら特に制限がなく時間や費用を掛けなくても練習ができ、飛行場所への移動も利用申請も不要で、機体は何度壊れても一瞬で元通りです。さらに、プロポ(無線で操縦するためのコントローラー)を使えるようにする(※後述)とより実機の操縦に近い状態で練習ができます。
上記の機体側の問題は全く解決できませんが、練習をするだけなら最も良い方法だと思います。
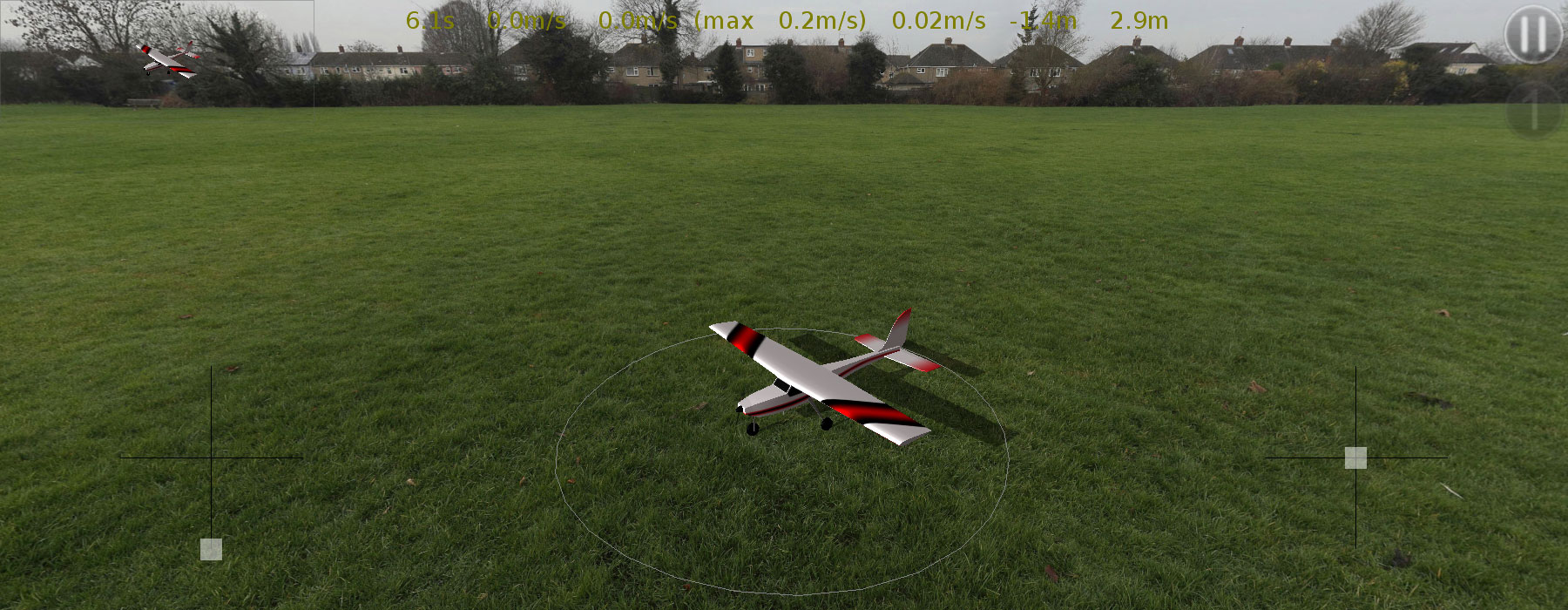
今回は、無料で利用でき、動作が軽く、挙動などの再現度も高い「PicaSim」というシミュレーターを使うことにしました。最初から制限がなく、プロペラ機、ジェット機、グライダーなどが選べて、飛ばす場所も自由に選べます。
着陸時に強い衝撃が機体に加わると、着陸装置やプロペラ等が破損したという判定が下されて強制的にリセットされますが、修理などに時間は掛からず機体は一瞬で元通りになり、最初の位置から再スタートとなるため、基本的にキーボード操作も不要で練習に集中できます。
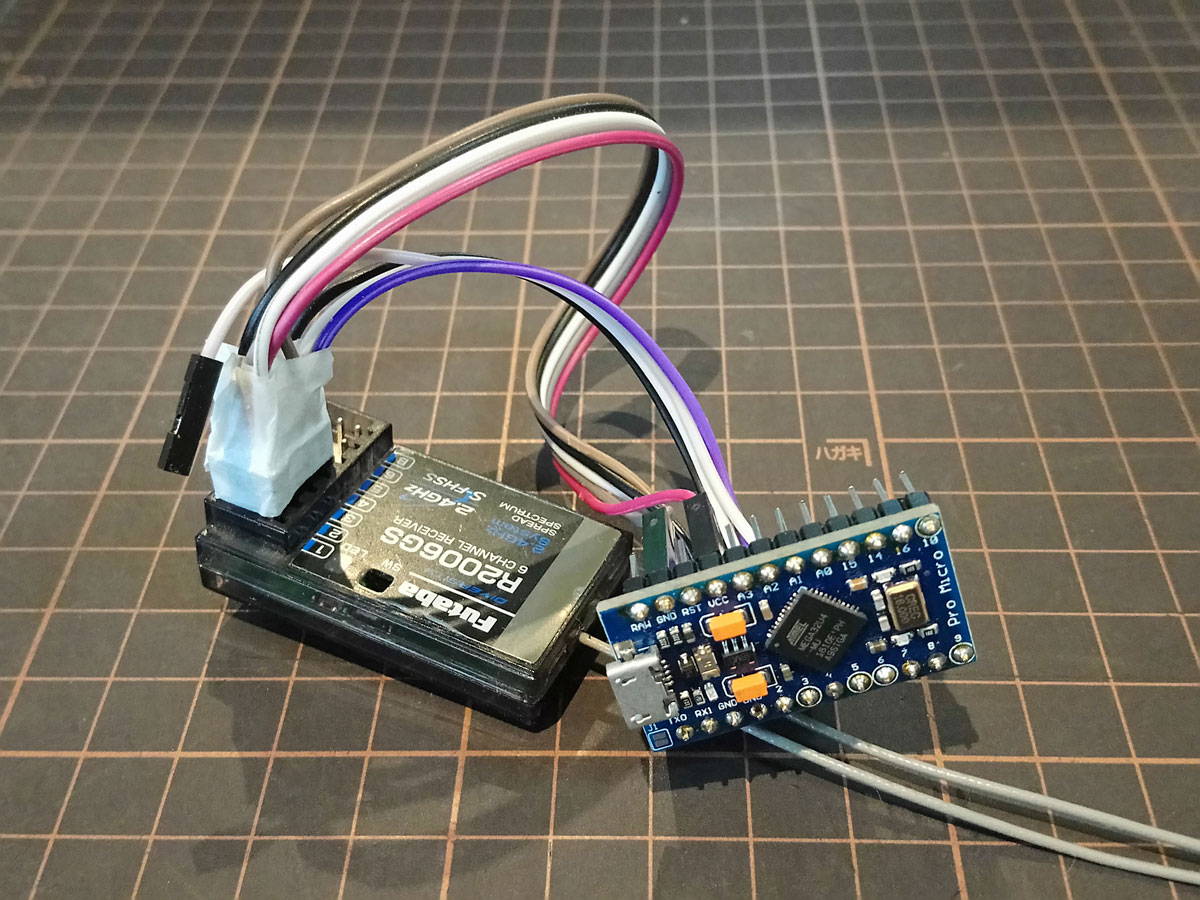
プロポ(Futaba T6J)については、USB接続できるマイコン(ProMicro)にプログラムを書き込んで受信機(R2006GS)に配線し、PC用のゲームコントローラーとして使えるようにしました。
プログラムと配線については、ゾんさんのブログ(https://ameblo.jp/zon4889/entry-12591683648.html)を参考に4ch化(Z軸を無効にしてRudder、Throttleを有効に、設定はX軸やY軸用と同様に、3ch用のプログラムをコピー&ペーストして4ch用に変更)しています。
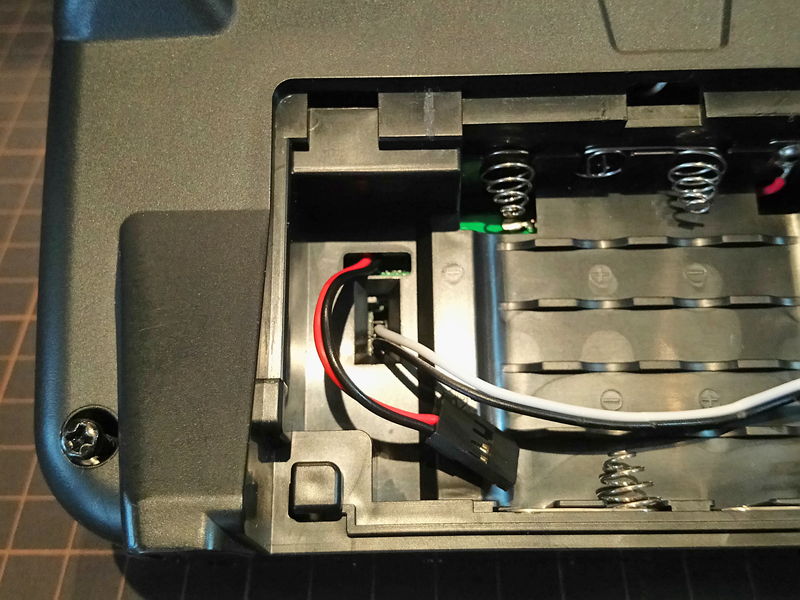
さらに、プロポには通常、電池やバッテリーが必要ですが、バッテリー用のコネクタにブレッドボード用ジャンパー線を差してACアダプターから直接給電するようにしました。
これで、何時間でも練習し続けられる環境ができました。
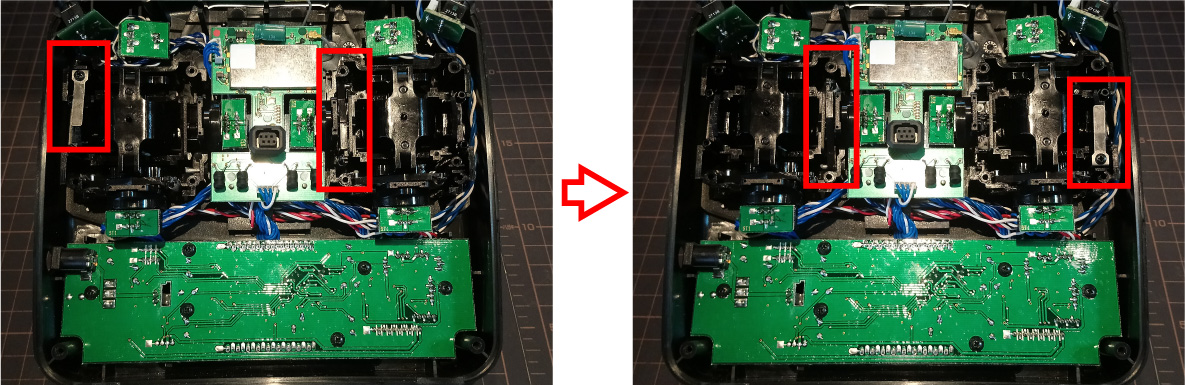
なお、日本製プロポはラジコンカー用の物をラジコン飛行機用に流用したという歴史的経緯の影響でモード1(左スティックでラダーとエレベーター、右スティックでエルロンとスロットル)に合わせて製造されているようで、実際の戦闘機やフライトシミュレーターのジョイスティックのように左手でスロットル、右手で操縦桿(エルロンとエレベーター)という割当てになっていないため、直感的でなくかなり操作しにくいと感じました。
そこで、欧米製プロポのようにモード2(左スティックでラダーとスロットル、右スティックでエルロンとエレベーター)に合わせて部品の位置を付け替えました。また、飛ばす予定の実機にはエルロンがまだないため、PicaSimの設定でラダーとエルロンを入れ替えて、右スティックだけで旋回、上昇下降ができるようにして、実機に合わせた練習ができるようにしました。
心理学などで初心者から中級者になるには50~100時間程度掛かると言われていたり、練習できない日が続くと成果が戻ってしまうというような話を聞いたことがあると思います。練習の成果を効率良く上げるには毎日練習ができる環境が必要となります。
ラジコン飛行機の場合は作るのにも直すのにも時間が掛かるのでとにかく機体を壊さないことが重要になりますが、シミュレーターであれば一瞬です。さらに、天気や施設の都合などを気にする必要もなく、実機の操作で使うプロポとシミュレーターがあれば毎日練習ができます。
ただし、作ったり修理したりするための知識や技術は全く身につかない、シミュレーターは一部を再現しているだけで機体の特性や風の変化など、近づけられてはいるものの大半は現実とは異なるので、実機は実機での練習が必要ということに注意が必要です。
ラジコン飛行機の場合、一般的に初心者は上級者に教わりながら、当面の間は場周パターンのみを練習して、離着陸は上級者にやってもらうということが多かったようです。
しかし、一人で飛ばせるようになるためには離着陸が自力でできる程度まで上達する必要があります。
そこで、今回は下記のような練習方法を考えて実践しました。
※無風の状態で練習すると失敗の原因が操作ミスのみになるため、操作と機体の挙動の関係がわかりやすくなります
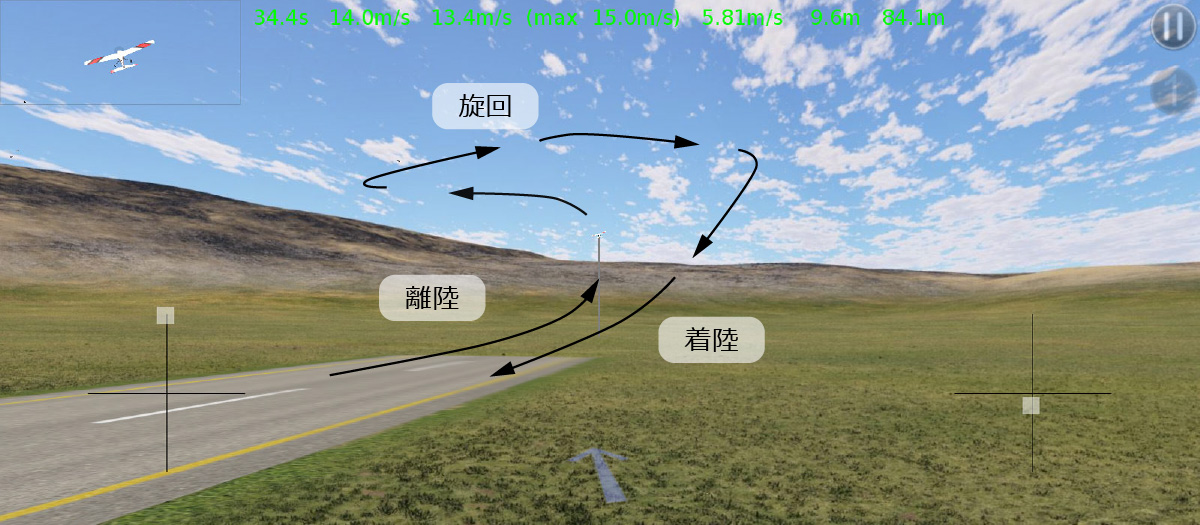
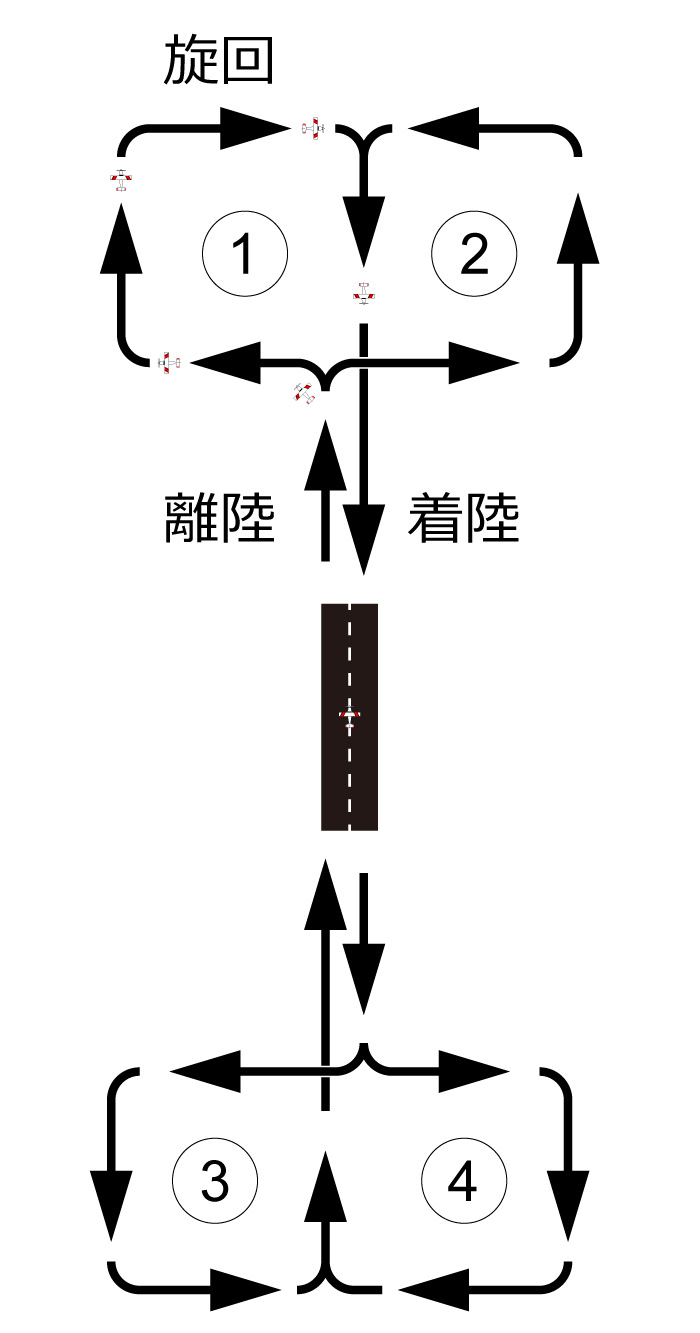
連続離着陸は、短時間で着陸を何度も繰り返すことで、短期間で自力で着陸できるようにするために入れました。上や左の画像のように①~④の経路のどれか1つを繰り返し、ある程度できるようになったら、または飽きてきたらどの方向からでも操縦できるようにするために別の経路に変えて練習しました。
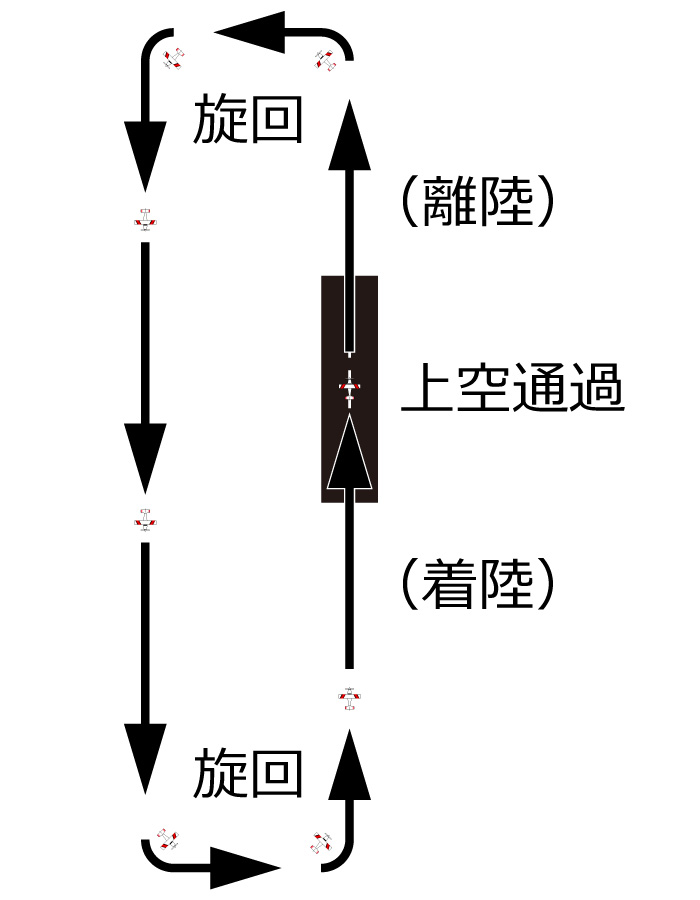
その後、ある程度着陸できるようになってきてから右の画像のように場周パターンも練習しました。これによって、旋回してから向きや高度を微調整しながら滑走路へ着陸するという操作に慣れて、繰り返し周回することで少しずつ滑走路の延長線からのずれがわかるようになって、戻ってきた時に滑走路の外に出てしまうということが減りました。
最初の頃は10回中9回以上は墜落していましたが、約1か月の練習の結果、墜落判定は10回中1回程度に抑えられるようになりました。その墜落判定も大半は致命的なダメージではなくやや強めの衝撃がある着陸になっただけで、機体が壊れるような墜落は数十回に1回程度にまで抑えられるようになってきました。
しかし、滑走路への着陸もできるようになってきたのですが、まだ滑走路の端に行ったり斜めに降りたり、高度がなかなか下げられずに滑走路の奥の方で着陸してしまうことが多い状態です。
シミュレーターは実機とは別物ですが、操縦に慣れてすぐに反応できるようになるまでは、毎日、特に制限もなくできる練習方法としてとても良いと思います。複数の異なる機体で操縦練習をすることで、異なる機体にも短時間で対応できるようにしておけば、実機の操縦の際にもすぐに対応できるようになるはずです。
今回は現状の機体に合わせてエルロンがない状態で練習しましたが、やはりエルロンはあった方が操縦性も良くなるので実機にもエルロンを追加したいと考えています。ただし、機体のバランスが変わってしまうので再調整は必要です。
今後は、シミュレーター上で風のある状態での練習を入れたり実機を使った着陸練習用装置を作ったりする予定ですが、実機を自由に飛ばすにはより多くの練習や広場の利用許可などが必要な状態なので、もう少し先になりそうです。
TOP