BLOG

IchigoJamで走るミニ自動車づくり!
こんにちは。
未来工作ゼミのアベちゃんです。
前回のIchigoJamを使ったゲーム作りに引き続き、
長野市ICT産業誘致・起業プロジェクト(FBページ)のもと、
今回は、信州大学工学部で、IchigoJamを使ったライントレーサーを作るワークショップを開催しました。
走るロボット、ライントレーサー!
ライントレーサーとは、ミニカーに「目」となる光センサーを付けて、
白い床に描かれた黒い線の上だけを自動的に走らせる、ロボットの一種です。
カンタンな仕組みで初心者から楽しめて、プログラム次第では様々な走り方を表現できます。
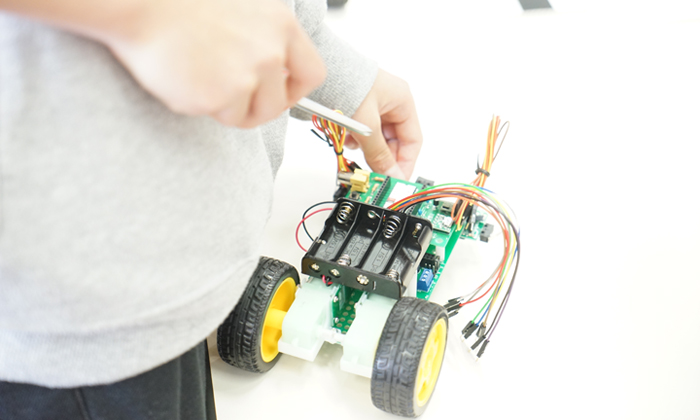
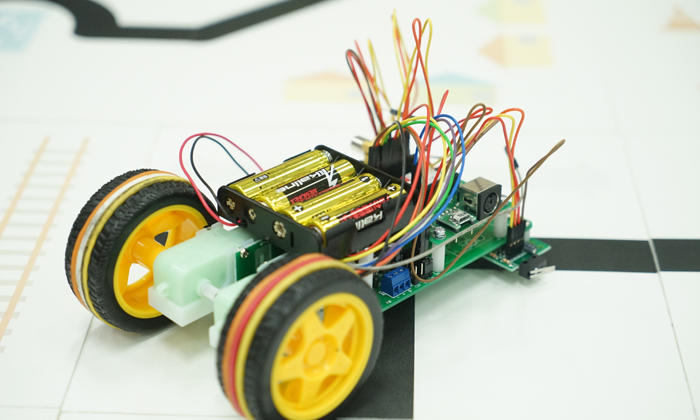
まずは、ワークショップの初めにIchigoJamをマシンに取り付けます。
ミニカー前方左右には目となるセンサー、後方左右には足となるモーターがついています。

回路をつないで、マシンの準備が整ったら、いよいよプログラミングです。
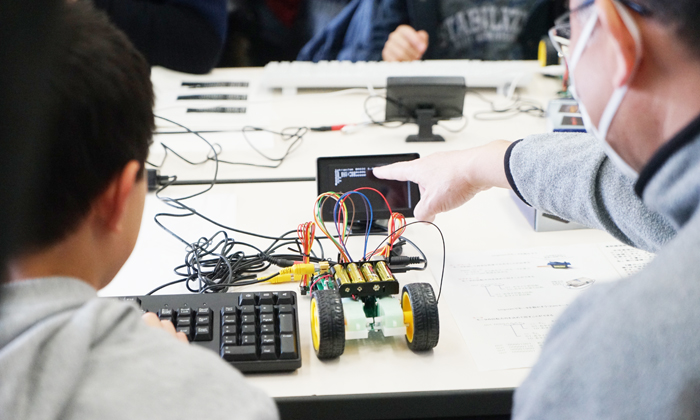
信州大学の不破先生が、ライントレーサーの基本的な仕組みとプログラムを説明してくれました。
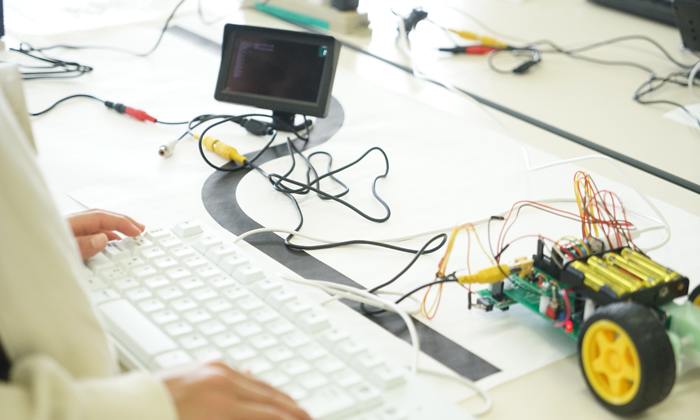
まずは、まっすぐな黒い線をたどれるようにするところから始めます。
センサーから教えられた床の白黒に応じて、モーターをどう回すかがライントレーサーのキモです。
進みすぎちゃったり、ヘンな方向を向いちゃったりしたら、プログラムを変えてみよう。
信州大学と長野高専の先生やお兄さんたちが、丁寧に教えてくれました。

直線や曲線など、色々な線をたどるためにはどうしたらいいかな。
こっちのセンサーが黒を踏んでいてこっちのセンサーが白を踏んでいるから・・・
モーターはどっちに回せばよかったかな?
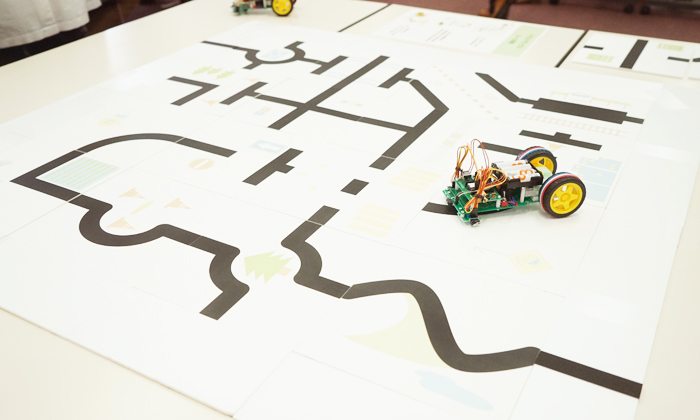
そして最後に待ち構えるのはこのゲーム、「スクスクランブル」!
パネルを入れ替えながらスタートからゴールまで自分のマシンを誘導するゲームです。

自分のマシンにプログラムした内容をキチンと把握した上で、この道ではこういう動きをするはずだから、
ここでこういうパネルを選んで・・・と、事前の作戦が重要です。
・・・がしかし、マシンが思った通りの動きをしてくれないのもご愛嬌。
そういうときはパネルを入れ替え直して再チャレンジ!
みんなそれぞれの戦略で、カーブや直線、時には行き止まりさえ上手に利用して、
コースクリアに挑戦していました。
さいごに、コースを走る様子もムービーにしてみました。
うまくゴール出来たときは歓声が起こるほどの熱中具合!
他の人の走り方を見て、プログラムの改造の参考にしている人もいました。
おわりに
ちょっと難しいかな、なんて思ってましたが、予想をこえてたくさんの人がクリアしていました!
遊びながらも、みなさんそれぞれがオリジナリティのある工夫が出来て、とても良い時間を過ごせたと思います。
TOP